Hello, if you have any need, please feel free to consult us, this is my wechat: wx91due
Foundations of Robotics (ROB-GY 6003)
Homework Assignment | Chapter 4
Homework Problems: 4.8, 4.9, 4.18, 4.19, 4.24
Instructor’s Note: For questions that ask for the number of solutions, you only need to indicate the number as your answer (e.g., none, one, two, infinite…). However, you may find it intellectually rewarding to try to “prove” your answer arrived at by physical intuition through either attempting to analytically or numerically solve for the inverse kinematics.
4.8 [12] Given a desired position and orientation of the hand of a three-link planar rotary-iointed manipulator, there are two possible solutions. If we add one more rotational joint (in such a way that the arm is still planar), how many solutions are there?
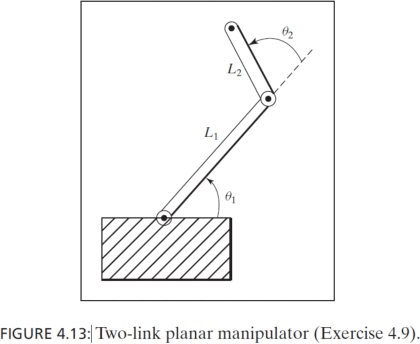
4.9 [26] Figure 4.13 shows a two-link planar arm with rotary joints. For this arm, the second link is half as long as the first-that is,  . The joint range limits in degrees are
. The joint range limits in degrees are

Sketch the approximate reachable workspace (an area) of the tip of link 2.
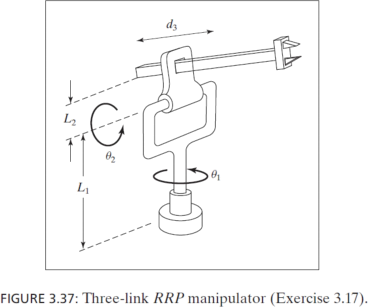
4.18 [15] Consider the RRP manipulator shown in Fig. 3.37. How many solutions do the (position) kinematic equations possess?
4.19 [15] Consider the RRR manipulator shown in Fig. 3.38. How many solutions do the (position) kinematic equations possess?
4.24 [20] Given the description of link frame {i} in terms of link frame {i -1}, find the four Denavit-Hartenberg parameters as functions of the elements of  .
.