Hello, if you have any need, please feel free to consult us, this is my wechat: wx91due
Foundations of Robotics (ROB-GY 6003)
Homework Assignment | Chapter 3
Homework Problems: 3.1, 3.4 (regard {S} as {0}, and {T} as {3}), 3.8, 3.12, 3.16, 3.17
EXAMPLE 3.3
Figure 3.6(a) shows a three-link planar arm. Because all three joints are revolute, this manipulator is sometimes called an RRR (or 3R) mechanism. Fig. 3.6(b) is a schematic representation of the same manipulator. Note the double hash marks
70 Chapter 3 Manipulator kinematics
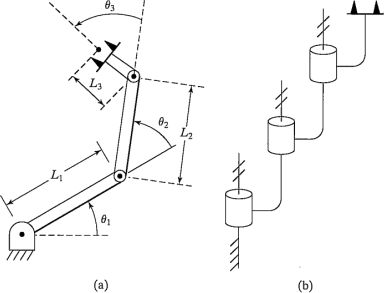
3.1 [15] Compute the kinematics of the planar arm from Example 3.3.
3.4 [22] The arm with three degrees of freedom shown in Fig. 3.30 has joints 1 and 2 perpendicular, and joints 2 and 3 parallel. As pictured, all joints are at their zero location. Note that the positive sense of the joint angle is indicated. Assign link frames (0) through (3) for this arm-that is, sketch the arm, showing the attachment of the frames. Then derive the transformation matrices  ,
,  , and
, and  .
.
3.8 [13] In Fig. 3.31, the location of the tool,  , is not accurately known. Using force control, the robot feels around with the tool tip until it inserts it into the
, is not accurately known. Using force control, the robot feels around with the tool tip until it inserts it into the
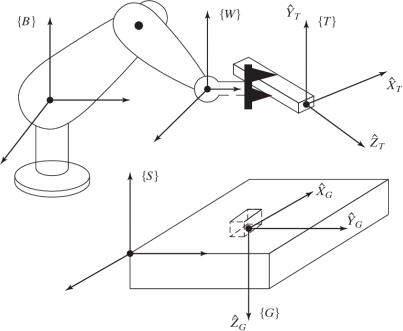
FIGURE 3.31: Determination of the tool frame (Exercise 3.8).
00 Chapter 3 Manipulator Kinematics
socket (or Goal) at location  . Once in this "calibration" configuration (in which (G) and (T) are coincident), the position of the robot,
. Once in this "calibration" configuration (in which (G) and (T) are coincident), the position of the robot,  , is figured out by reading the joint angle sensors and computing the kinematics. Assuming
, is figured out by reading the joint angle sensors and computing the kinematics. Assuming  and
and  are known, give the transform equation to compute the unknown tool frame,
are known, give the transform equation to compute the unknown tool frame,  .
.
3.12 [08] Can an arbitrary rigid-body transformation always be expressed with four parameters (a, α, d, θ) in the form of equation (3.6)?
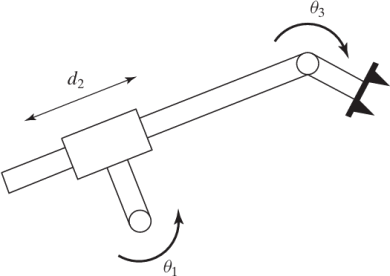
FIGURE 3.36: RPR planar robot (Exercise 3.16).
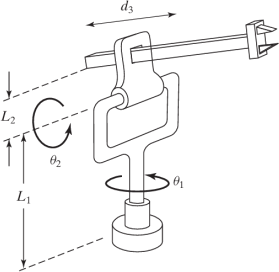
FIGURE 3.37: Three-link RRP manipulator (Exercise 3.17).
3.16 [15] Assign link frames to the RPR planar robot shown in Fig. 3.36, and give the linkage parameters.
3.17 [15] Show the attachment of link frames on the three-link robot shown in Fig. 3.37.